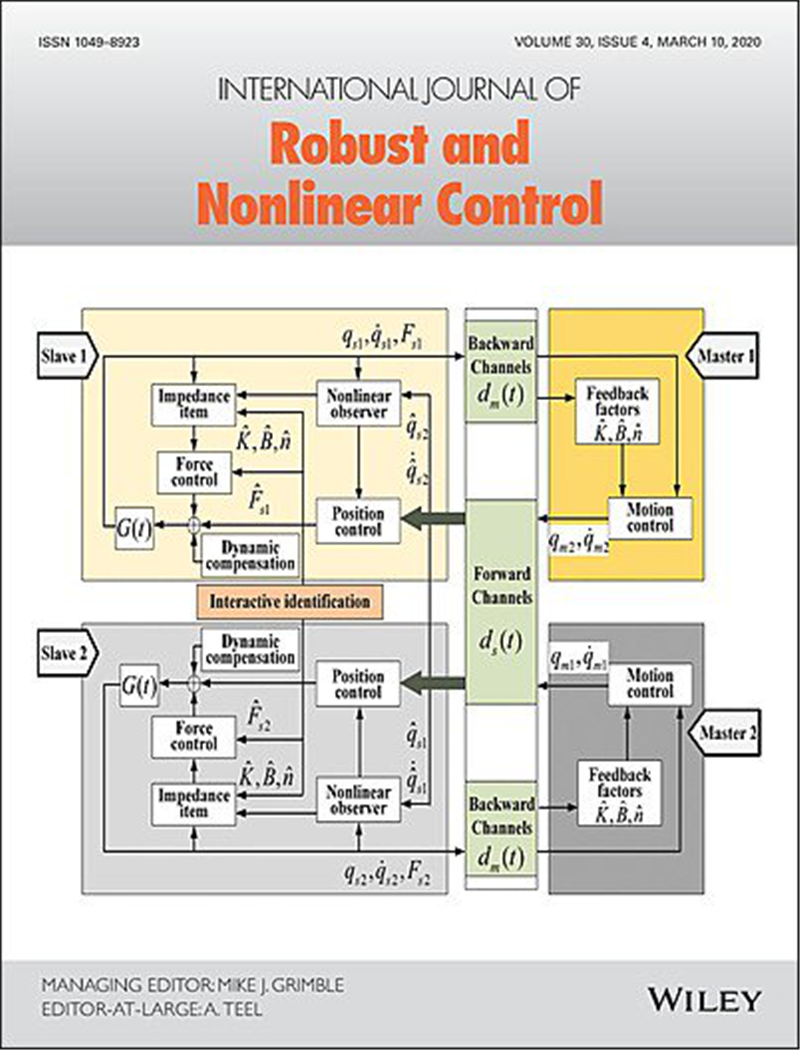
西工大新闻网4月3日电(黄攀峰 马志强)近日,西北工业大学航天学院黄攀峰课题组在非线性系统控制TOP期刊“International Journal of Robust and Nonlinear Control”发表封面论文“High-gain nonlinear observer-based impedance control for deformable object cooperative teleoperation with nonlinear contact model”(INT J ROBUST NONLIN,2020,30(4),pp. 1329-1350. 论文链接:https://doi.org/10.1002 /rnc.4880)。该论文西北工业大学为唯一单位,第一作者为黄攀峰课题组博士研究生鹿振宇,通讯作者为黄攀峰教授,该研究成果旨在解决多回路、变时延情况下针对柔、弹性目标作业的多机器人协同遥操作问题。该研究得到了国家杰出青年科学基金、国家自然科学基金和中央高校基本科研业务费专项资金的支持。
随着我国在新冠肺炎疫情防控中取得阶段性胜利,远程医疗机器人逐渐走入人们的视线。不仅如此,遥操作(远程操作)机器人在空间操作、放射以及深海环境中也具有较高的应用价值,它可以代替人完成危险、复杂操作的同时保证操作人员的安全。在过去的十余年,黄攀峰课题组围绕空间机器人及其遥操作技术开展研究,承担了多项国家级的重大任务,形成了深厚的成果积淀。相比于传统的单机器人遥操作,多机器人遥操作具有效率高、大负载、操作稳定的特点,其可执行任务也远超单机器人的任务范畴。但是,其独特的多智能体多回路通信结构导致的不确定性大时延、非结构化操作环境以及多机器人协作的复杂性,对多机器人遥操作系统的协同作业的稳定性形成极大的挑战。
多机器人协同作业在空间操作中具有重要实用价值,本文从相关项目需求和挑战出发,构建了面向柔、弹性目标操作的多机器人遥操作的协同感知和控制框架。在考虑遥操作系统多回路变通信时延和目标不规则形变的条件下,通过交互参数辨识、构建高增益非线性观测器和阻抗控制等方法,实现了对非线性目标模型参数辨识的同时,保证了遥操作系统的整体操作和控制的稳定性,该理论成果在课题组多机器人遥操作仿真实验平台中得到验证。此项研究下一步将推进相关理论成果在相关工程实践中的应用。
(审稿:常威威 苏海军)